

When working on embedded systems, choosing the right operating system is a fundamental architectural decision. The OS influences determinism, safety, certification effort, scalability, tooling, and long-term maintenance.
In this article, we examine the embedded OS landscape, from lightweight RTOSes and safety-certified solutions to high-assurance real-time systems, before concluding with embedded Linux via Yocto, which serves a different but complementary role.
The operating systems discussed here are representative examples of their respective classes, not an exhaustive list.
Other important embedded operating systems and RTOSes not covered in detail include VxWorks, Eclipse ThreadX, RTEMS, embOS, Nucleus RTOS, PikeOS, and LynxOS.
What is an RTOS and where is it used?
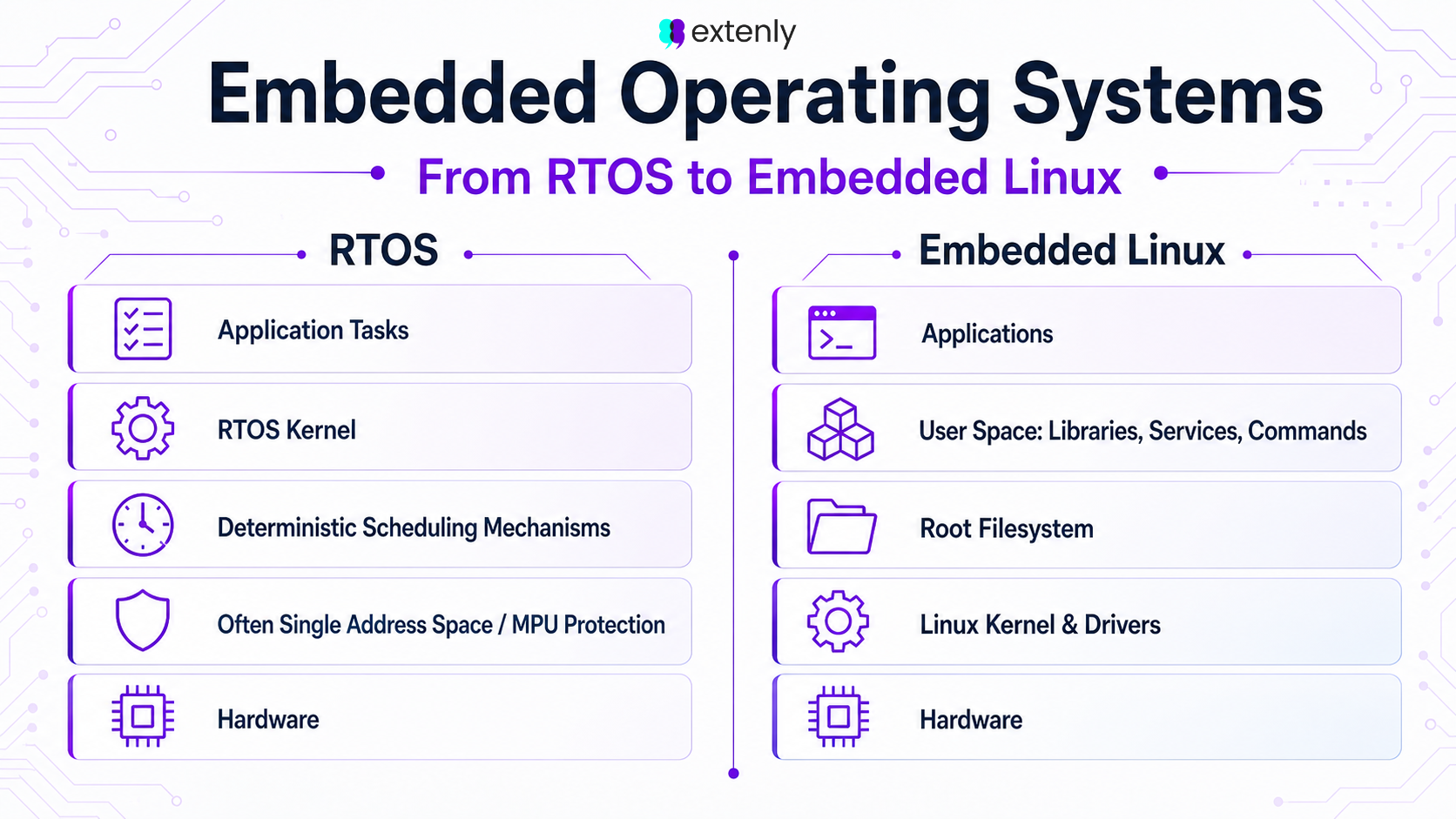
A Real-Time Operating System (RTOS) is designed to support deterministic behavior through mechanisms such as priority-based scheduling, timers, and interrupt handling. However, actual timing guarantees depend on the full system design, including task priorities, interrupt behavior, worst-case execution time analysis, drivers, hardware, and system load.
This does not necessarily mean fast, but predictable.
RTOSes are typically used when:
- Timing constraints are critical
- Tasks must meet deadlines
- Hardware resources are constrained
- The system must respond reliably to external events
Common RTOS use cases include:
- Embedded control systems
- Microcontroller-based systems
- Motor control and power electronics
- Industrial controllers
- Automotive ECUs
- Medical devices
- Aerospace and defense systems
Not all RTOSes are equal. Some are optimized for minimal footprint and low overhead, others emphasize safety certification support, and others are designed for high-assurance, mission-critical environments.
Lightweight RTOSes for Resource-Constrained Embedded Systems
This category includes RTOSes designed for deeply embedded systems that require deterministic real-time behavior with minimal overhead. Rather than targeting a specific class of processors, these RTOSes are often deployed in configurations without MMU-based process isolation, commonly using a single-address-space model. Some RTOSes in this category may also support MPU-based memory protection or other isolation mechanisms depending on the architecture and configuration.
Lightweight RTOSes are commonly used where predictability, low latency, and tight control over system behavior are more important than process separation or rich operating system services. This model applies regardless of whether the underlying hardware is a traditional microcontroller or a more capable embedded processor used in a microcontroller-style configuration.
FreeRTOS
Overview
FreeRTOS is a minimalist RTOS originally developed by Richard Barry and now maintained by Amazon. It is designed to provide deterministic scheduling with a very small kernel footprint, making it well suited for deeply embedded systems where predictability and low overhead are critical.
Best for:
Resource-constrained embedded systems that require precise timing, deterministic scheduling, and minimal overhead, often without MMU-based process isolation.
Strengths:
- Very small kernel footprint (in minimal configurations, the core FreeRTOS kernel can occupy only a few kilobytes of flash)
- Broad industry adoption across many embedded domains
- Extensive documentation and examples
- Optional integration with AWS IoT services
Limitations:
- Limited built-in networking and file system support compared to larger operating systems
- Not fully POSIX-compliant (limited POSIX API support available)
Zephyr RTOS
Overview
Zephyr is a scalable, real-time operating system (RTOS) hosted by the Linux Foundation. It is designed for embedded systems that require deterministic behavior while offering a more modular and feature-rich environment than classic RTOSes, particularly for connected and security-aware devices.
Best for:
Connected embedded systems that require real-time responsiveness, configurability, and a richer feature set (such as networking and security) than traditional minimalist RTOSes.
Strengths:
- Actively maintained with strong community and industry support
- Modular architecture with built-in security mechanisms (including secure boot support and MPU-based memory protection)
- Modern development workflow using CMake, west, and devicetree
- Broad hardware support across many embedded boards and SoCs
Limitations:
- Less established than FreeRTOS in long-standing, safety-certified legacy deployments
- Smaller middleware ecosystem compared to Linux-based systems and mature commercial RTOS platforms
SafeRTOS
Overview
SafeRTOS is a safety-certified real-time operating system developed by High Integrity Systems. It is inspired by the functional model of the FreeRTOS kernel but has been independently redesigned and implemented by functional safety experts to meet the requirements of safety-critical systems.
Best for:
Safety-critical embedded systems with deterministic control requirements, where safety certification is needed and the execution model does not rely on MMU-based process isolation.
Strengths:
- Developed to support functional safety standards such as IEC 61508-3 and ISO 26262 with accompanying evidence and documentation
- Familiar FreeRTOS API
- Suitable for constrained hardware
- Comes with safety documentation and evidence packs
Limitations:
- Commercial license
- Safety certification focuses on development rigor and determinism; SafeRTOS does not provide MMU-based process isolation, though platform/configuration-specific MPU-based separation mechanisms may be available.
- Limited scalability for highly complex or mixed-criticality systems compared to separation-kernel or MMU-based RTOS platforms.
Comparison: Lightweight RTOSes
| OS | Target | Safety Certification | POSIX | Open Source | License Model |
| FreeRTOS | Resource-constrained embedded systems; MPU support available on some ports | No | Partial | Yes | MIT |
| Zephyr | Connected/resource-constrained embedded systems; supports MPU-based protection on some platforms | Safety-oriented work / certification support in progress or vendor-dependent | Partial | Yes | Apache 2.0 |
| SafeRTOS | Safety-critical resource-constrained embedded systems with deterministic control requirements | Pre-certified variants available | No | No | Commercial |
Safety-Critical and High-Assurance RTOSes
As systems grow in complexity, or enter regulated domains, the requirements change. Determinism alone is no longer enough. These systems require:
- Strong isolation between software components
- Support for mixed-criticality workloads
- Formal safety and security certification
- Long-term stability and vendor support
This is where MMU-based and high-assurance RTOSes come into play.
QNX Neutrino RTOS
Overview
QNX Neutrino is a commercial, microkernel-based real-time operating system developed by BlackBerry QNX. It is designed for high-reliability, safety-critical embedded systems and is widely used in automotive, medical, industrial automation, aerospace, and transportation.
Best for:
Safety-critical, mission-critical, and high-availability systems where certification support, fault isolation, and deterministic behavior are mandatory.
Strengths:
- True microkernel architecture with strong fault isolation
- Supports hard real-time workloads with deterministic scheduling when properly configured
- POSIX-compliant API
- Supports functional safety certification to standards such as ISO 26262 and IEC 61508
- Proven in long-lifecycle products (10–20+ years)
- Excellent debugging and system observability tools
Limitations:
- Commercial licensing cost
- Smaller open-source ecosystem compared to Linux
- Steeper onboarding for teams used to Linux user-space flexibility
INTEGRITY RTOS
Overview
INTEGRITY RTOS is a separation-kernel-based real-time operating system developed by Green Hills Software. It is designed for systems requiring the highest levels of safety and security assurance, with strong spatial and temporal partitioning to support mixed-criticality workloads.
Best for:
Aerospace, defense, and high-assurance mixed-criticality systems.
Strengths:
- Strong spatial and temporal partitioning
- Extensive safety and security certifications
- Designed for mixed-criticality workloads
- Predictable, deterministic behavior
Limitations:
- Commercial licensing
- Smaller third-party and community ecosystem compared to Linux and general-purpose RTOS platforms
- Not intended for general embedded products
DEOS
Overview
DEOS is a partitioned real-time operating system developed by DDC-I, designed around strong time and space partitioning and aligned with avionics standards such as ARINC 653. It is used primarily in avionics and other high-assurance systems that require the highest levels of certification and determinism.
Best for:
Avionics-class and other high-assurance systems with strict certification and partitioning requirements.
Strengths:
- Strong time and space partitioning model
- Designed to meet avionics certification standards
- Deterministic real-time behavior
- Long-term stability and certification focus
Limitations:
- Primarily focused on avionics-class systems
- Small ecosystem
- Commercial licensing
Comparison: Safety-Critical & High-Assurance RTOSes
| OS / Project | OS Class | Safety Certification | POSIX | Open Source | License Model |
| QNX Neutrino | Safety-critical RTOS | Certification support / certified variants available | Yes | No | Commercial |
| INTEGRITY RTOS | High-assurance RTOS | Extensive safety/security certification evidence | Partial | No | Commercial |
| DEOS | High-assurance RTOS | Avionics-focused certification evidence | Partial | No | Commercial |
Embedded Linux and the Yocto Project
Yocto Project
While RTOSes focus on determinism and control, embedded Linux focuses on capability and flexibility.
The Yocto Project is not an operating system, but a framework for building custom Linux distributions tailored for embedded devices.
Why Yocto matters:
- Full Linux ecosystem (networking, filesystems, graphics, containers)
- Highly customizable build system
- Strong support for long-lifecycle products
- Open-source and vendor-neutral
- Widely adopted in industrial and consumer devices
Best for:
- Application processors (e.g., ARM Cortex-A)
- Systems with rich UIs and networking
- Devices where hard real-time is not the primary constraint (or handled via co-processors / RTOS cores)
Limitations:
- Not hard real-time by default; PREEMPT_RT can improve latency, but hard real-time behavior usually requires careful system design or dedicated RTOS/co-processor support
- Steep learning curve
- Longer build times
- Requires disciplined maintenance
In practice, Yocto often coexists with RTOSes, running on a main application processor while RTOS firmware runs on auxiliary cores handling real-time tasks.
Choosing the right OS
Your choice depends on a few core questions:
- What hardware are you targeting?
- Do you need real-time capabilities?
- How much memory/CPU do you have available?
- Do you need networking, UI, file system?
- What’s your team’s familiarity with Linux or RTOSes?
- Do you need functional safety certification or regulatory approval?
There is no single “best” embedded operating system, only trade-offs between performance, determinism, safety, cost, and long-term maintainability.
Lightweight RTOSes excel in deterministic, resource-constrained embedded systems, often using single-address-space or MPU-based protection models; safety-certified RTOSes address regulatory and functional safety requirements, high-assurance RTOSes serve mission-critical and avionics-class systems, and embedded Linux via Yocto enables complex, feature-rich products with long lifecycles.
Choosing the right OS means understanding your hardware, timing constraints, safety requirements, and maintenance horizon early in the system design. Decisions made at this stage define the architecture, and the compromises, for the lifetime of the product.